






















🔭 Amateurs / Experts
Mis à jour le 26 novembre 2025
04 juillet 2023
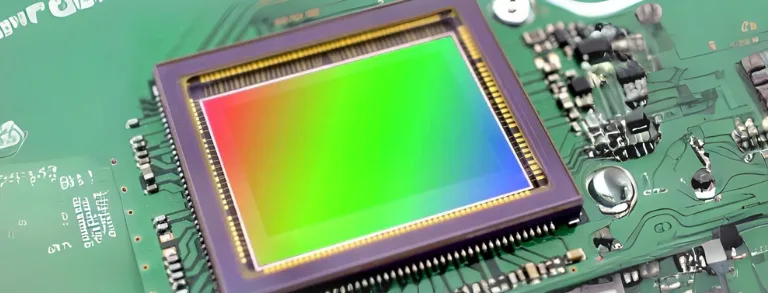
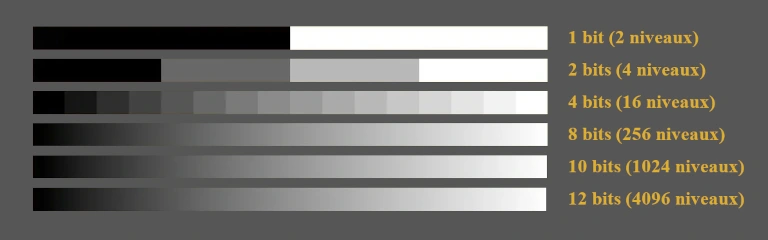
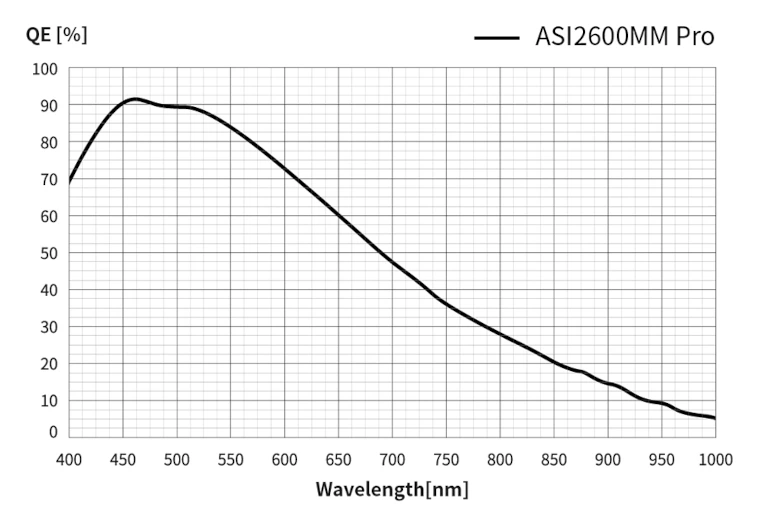
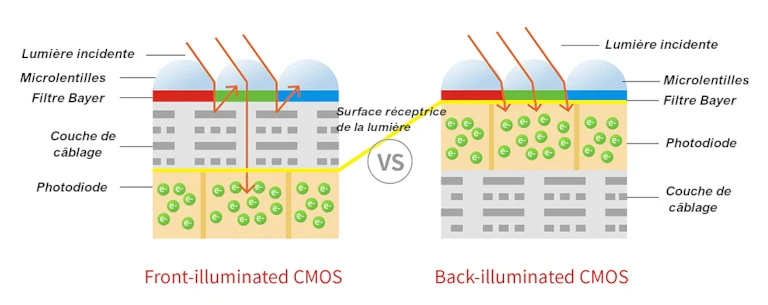
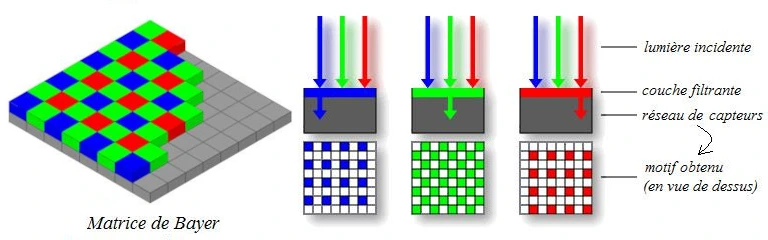
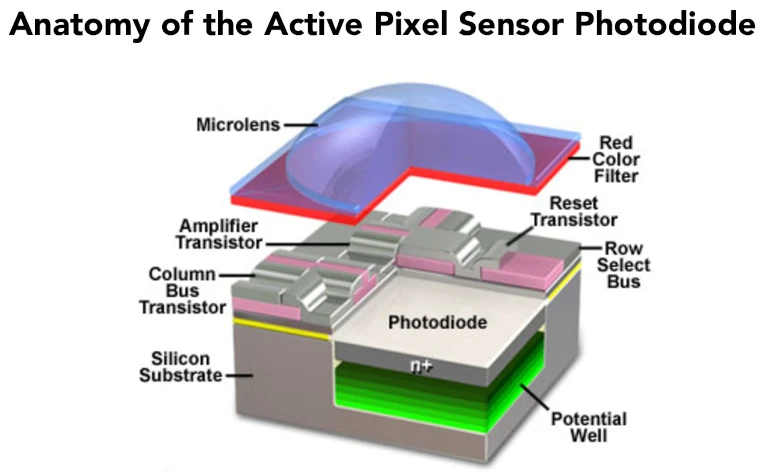
Comment fonctionne un capteur numérique ?


Recommandé
Caméra refroidie couleurs ZWO ASI533MC-P
Caméra haute performance pour le ciel profond et le visuel assisté
- Capteur CMOS couleur IMX533 (9 Millions de pixels)
- Taille pixel : 3.76µ
- Résolution : 3008 x 3008px / 11.31mm x 11.31mm
- Surface : 127.91mm²
- Refroidissement intégré pour l'imagerie longue pose
- Entrée coulant 50.8mm ou filetage M42 femelle
- Cette caméra nécessite une alimentation 11-15v pour fonctionner


Recommandé
Les secrets de l'Astrophoto 2ème edition - Thierry Legault
L'essentiel de la photographie astronomique pour les débutants
- Rédigé par un des meilleurs astrophotographes français
- Les techniques de base pour réussir
- Ouvrage simple et didactique
Partager ce contenu

Veuillez vous connecter pour noter cet article
Ajouter un commentaire
Produits recommandés